Tailor-made
Soft robotics simulation
Get advice and solutions from experts.
how can we help you ?
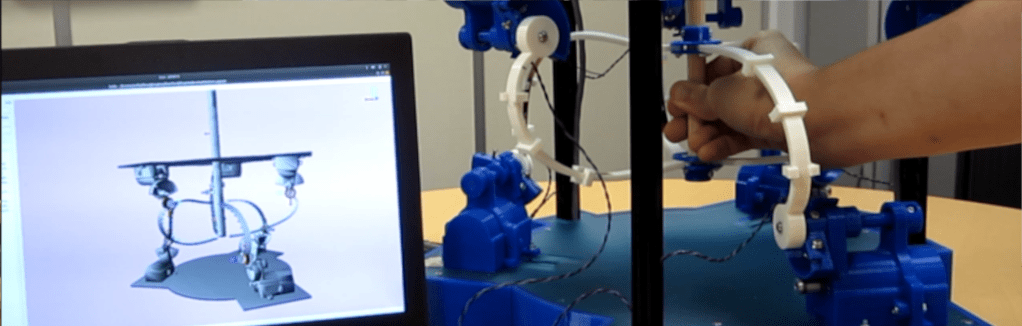
Design your robot
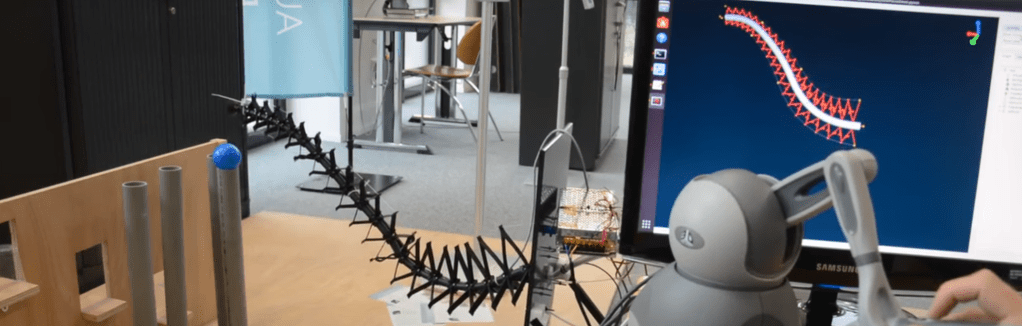
Tailor a configurable numerical simulation to assist you in the design of your robotic creation. Our capabilities encompass a wide range of actuation options, including but not limited to tendons, pressure mechanisms, and joints. Additionally, your robot can take on any desired shape, geometry, and material composition. We invite you to take a moment to explore our gallery, showcasing the possibilities.
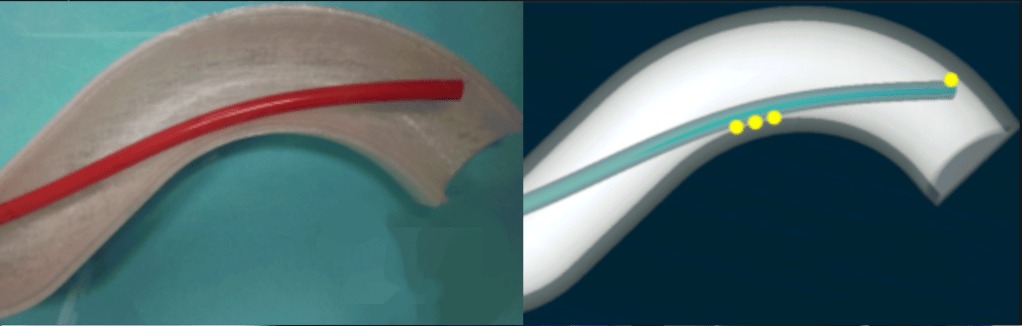
the robot in its environment
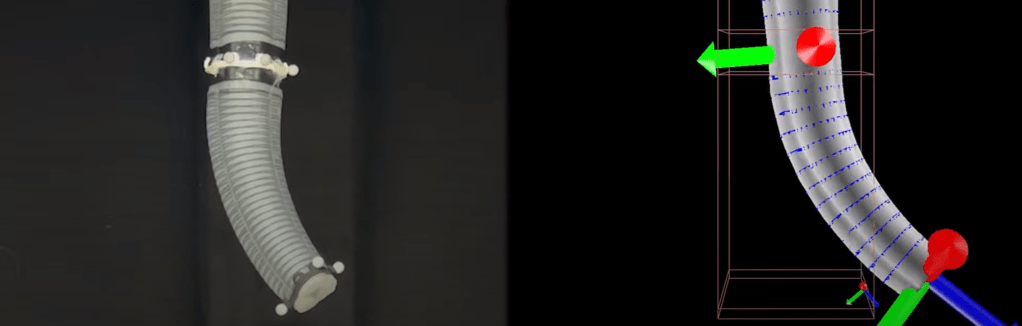
Alongside the numerical twin of your robot, we have the capability to replicate its surroundings and simulate the interactions between the robot and its environment, enabling you to efficiently develop prototypes and showcase demonstrations.
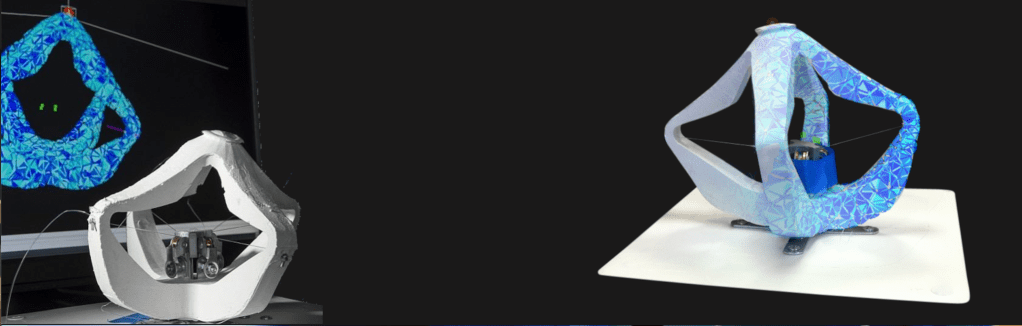
inverse kinematics and Planning
Based on the simulation, we can provide an inverse model of your robot. Using AI, or other optimization techniques, with this inverse model, we can help you develop efficient strategies to further enhance the design of your robot, and address trajectory planning challenges.

Two experts

Christian Duriez received the engineering degree from the Institut Catholique d’Arts et Métiers of Lille. He has a PhD degree in robotics from the University of Evry, in France. His thesis work was realized at CEA / Robotics and Interactive Systems Technologies, and followed by a postdoctoral position at the CIMIT SimGroup in Boston, USA. He is at INRIA since 2009, and he is currently the head of the DEFROST team and CEO of Compliance Robotics. He is an expert in soft robot models and control, fast finite element methods, haptic, simulation of contact response and other complex mechanical interactions.

Eulalie Coevoet has a master degree in advanced scientific computing and a PhD degree in computer science from the University of Lille, in France. Her thesis work was realized at INRIA, and followed by a postdoctoral position at McGill University in Montreal, Canada. She is currently the CSO of Compliance Robotics. She is an expert in the modeling and simulation of soft robots, finite element methods, optimization problem and inverse kinematics, contact, and other complex modeling.
